Lemon
Foxmere
RL Robotics Researcher ~ Digital Artist
RL Robotics Researcher & Digital Artist
RL Robotics Researcher ~ Digital Artist
RL Robotics Researcher & Digital Artist
Hey there, I'm Lemon! I'm a robotics researcher and student with a passion for UI/UX design and visual art. Currently, I'm studying at UCSC as a Computer Science undergrad while working with Dr. Steve McGuire in the Human Aware Robotics Exploration (HARE) Lab.
My main research interest is in the field of Multi-Task Reinforcement Learning. Specifically, how we can train generalized robotics controllers that are capable of a multitude of behaviors while maintaining high levels of performance and robustness. If this sounds interesting to you, I'd love to have a talk together!
When I'm not playing with robots, I like to cook and draw funny animal people.

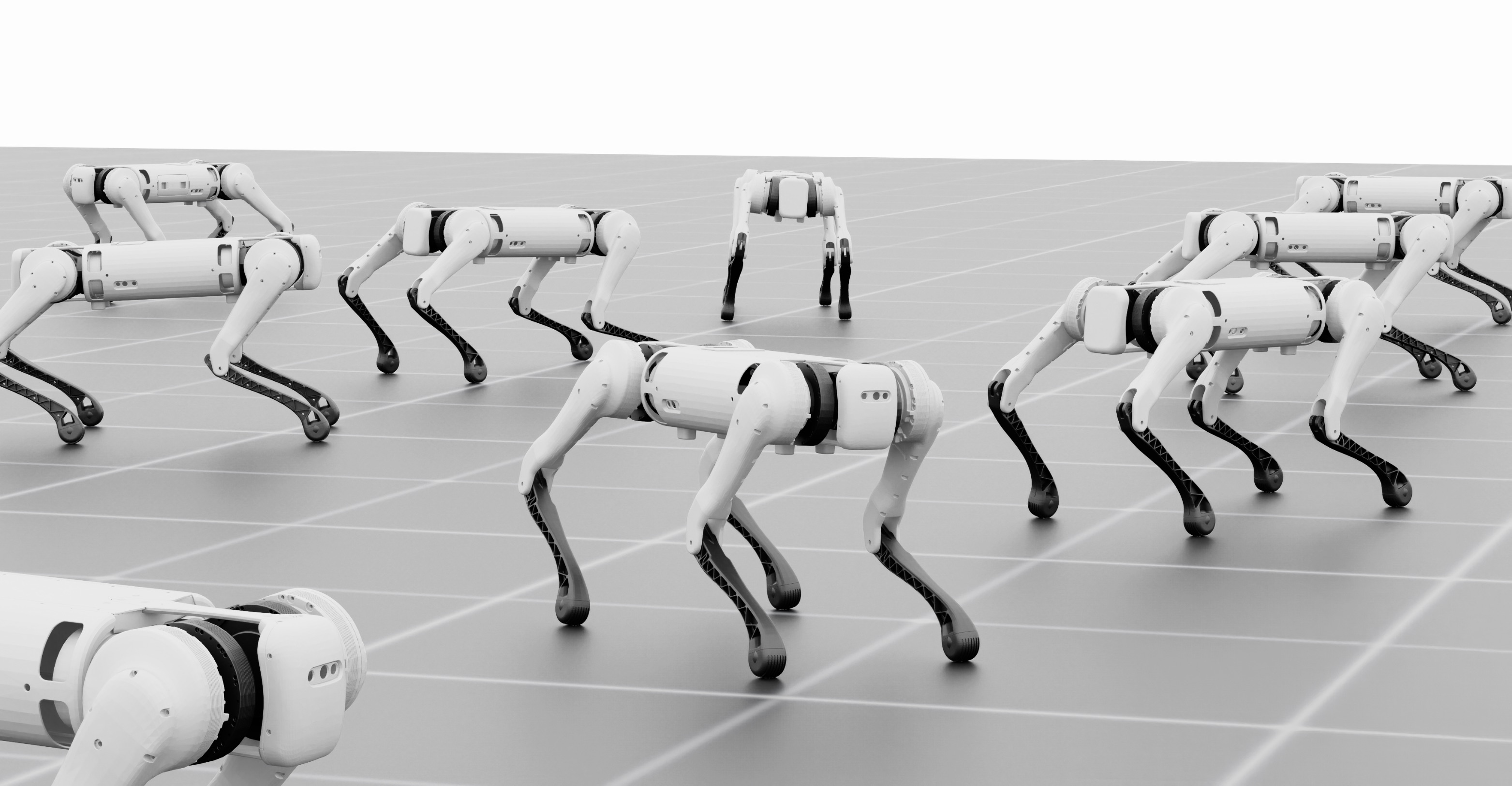
Working with Dr. Steve McGuire at UCSC's HARE Lab and Dr. Leilani Gilpin at the AIEA Lab, our goal is to develop a robust RL-based controller capable of smoothly switching between multiple behaviors for quadrupedal robots, while keeping the training process parallelizable and efficient.
Our main training and experimentation platform is Nvidia's IsaacLab. And through ROS2 and Gazebo, we aim to validate our controller on a physical Unitree B1 quadruped and demonstrate real-world robustness.
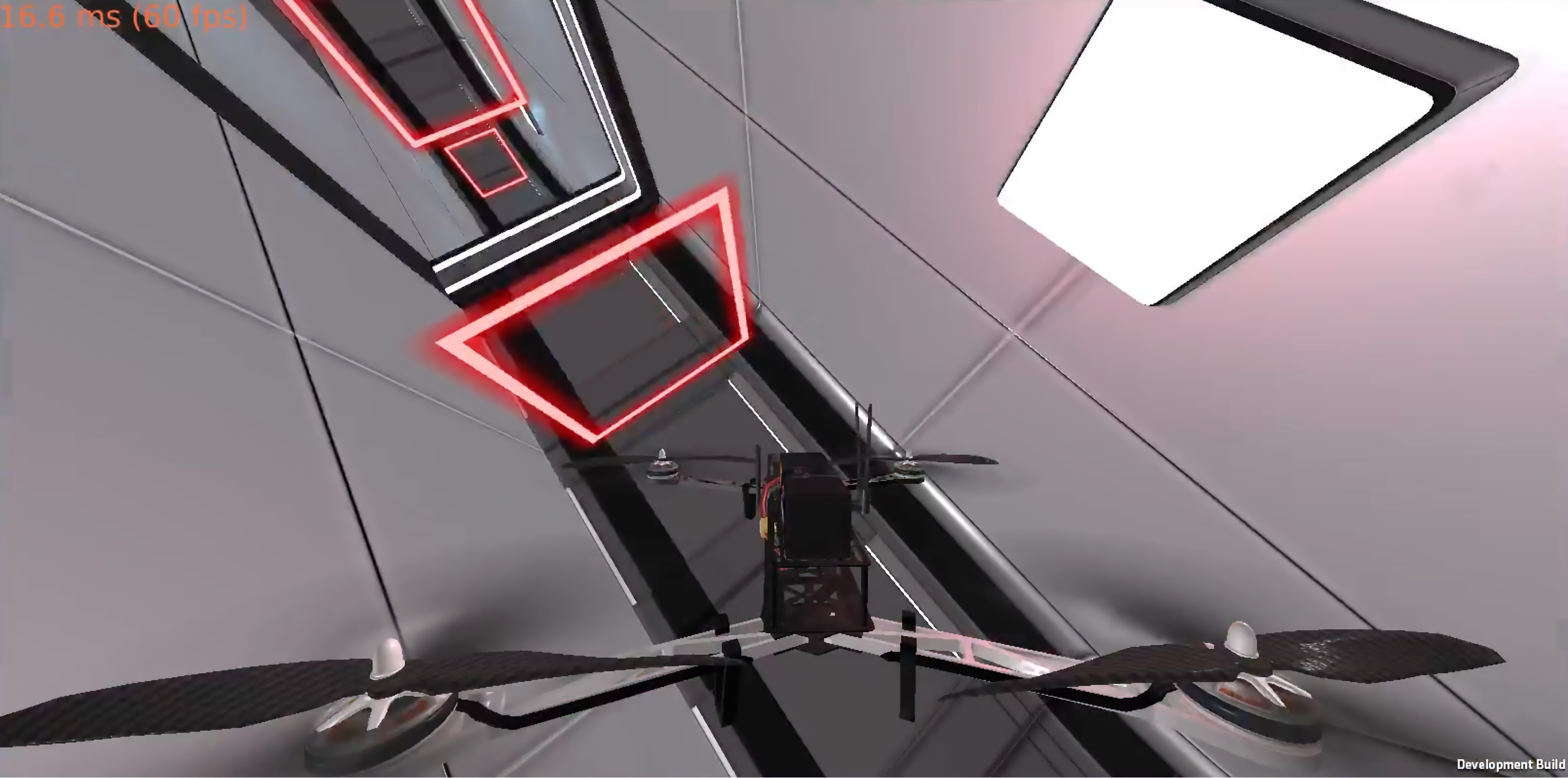
Implemented a geometric controller and polynomial trajectory optimizer for a drone racing competition as part of ECE 264: Visual Navigation for Autonomous Vehicles (based on MIT 16.485).
We finished the obstacle course in 8.5 seconds — 1.8 seconds faster than MIT's record of 10.3s as of March 2026
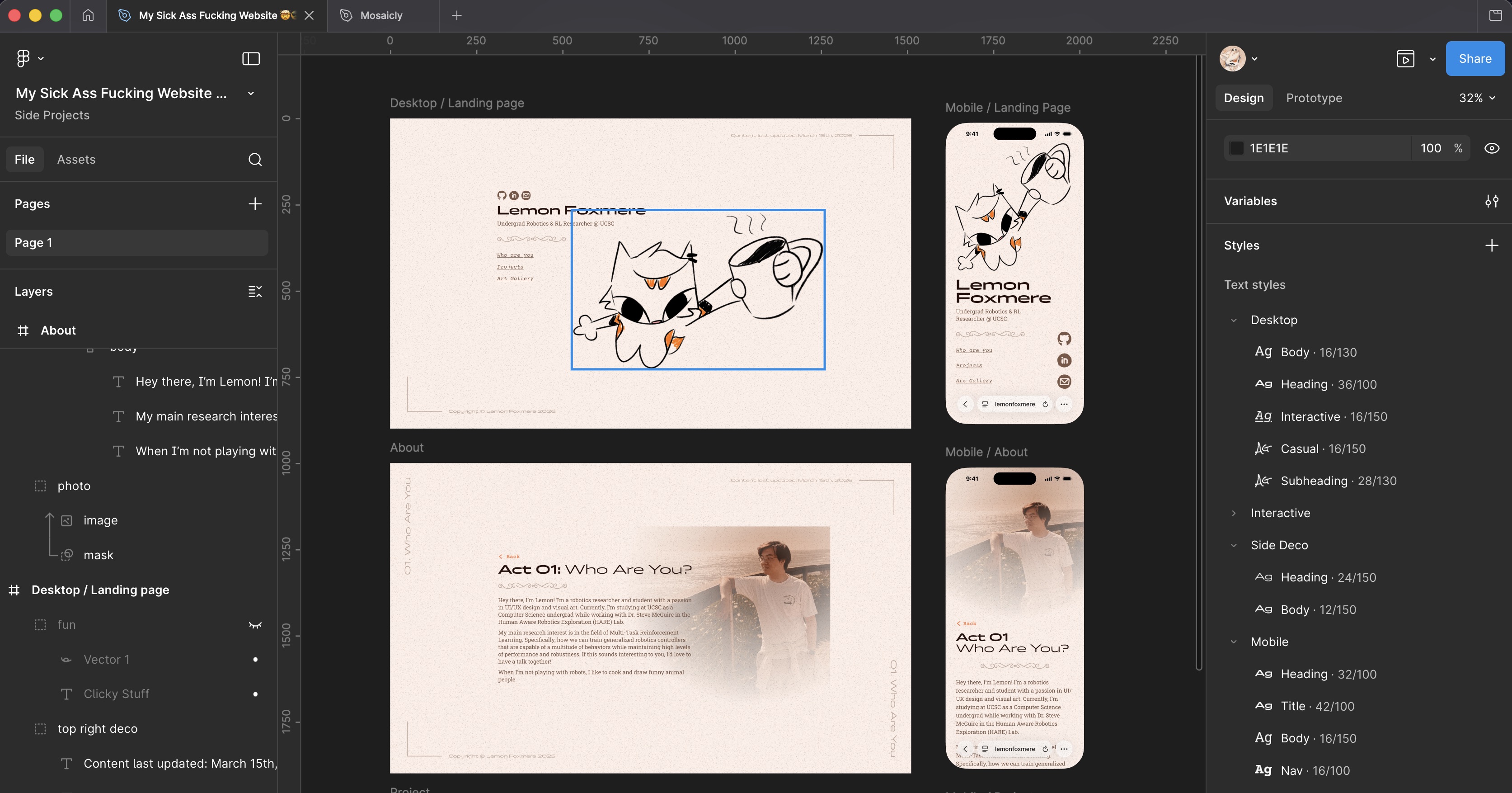
I built this website with SvelteKit and styled it with lots of SCSS. All the animations and art that you see are also hand-crafted by yours truly on Procreate :)
No AI was used in any part of this website.
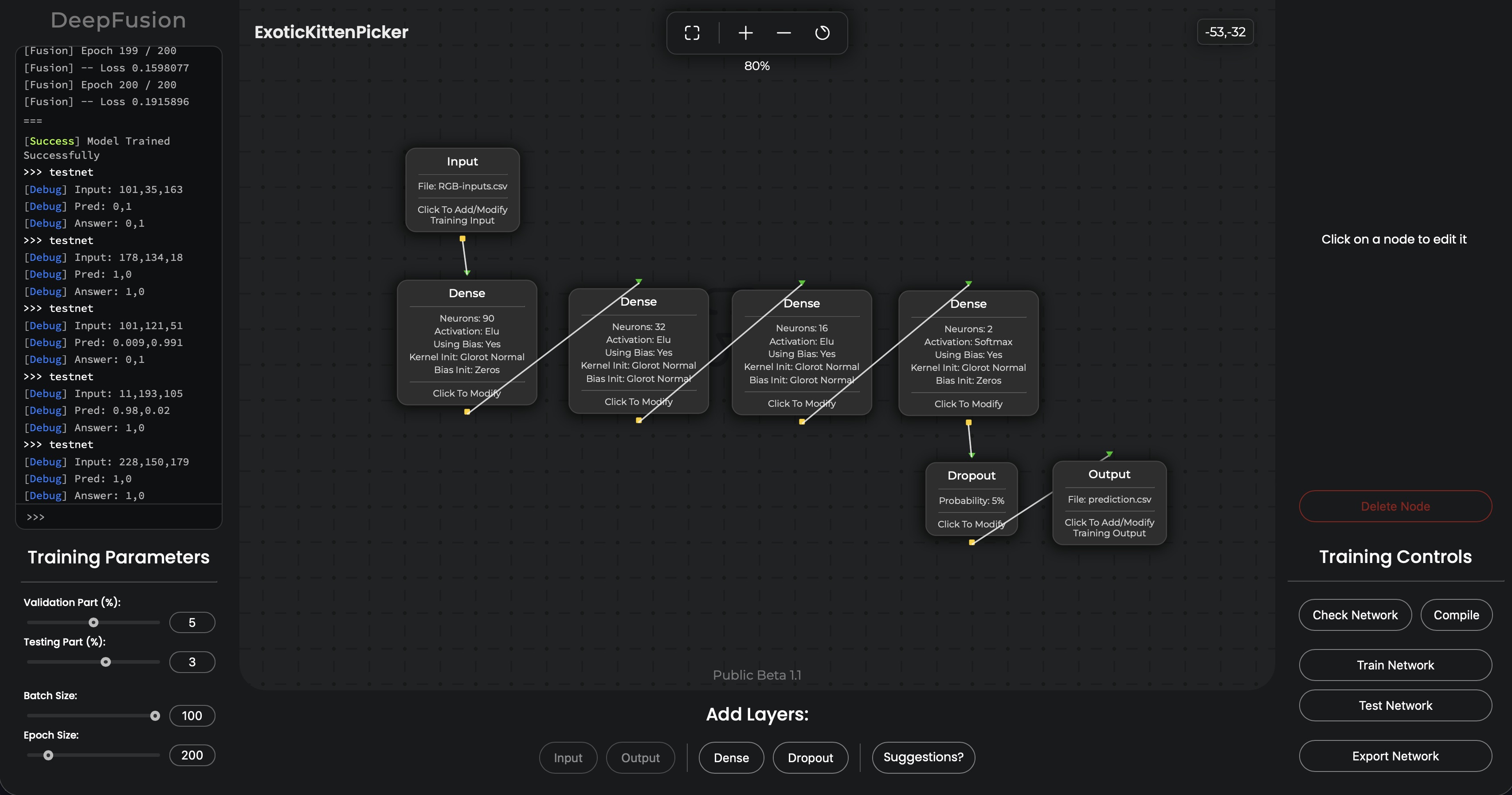
A WYSIWYG graphical neural network maker. It lets you to create and train simple neural networks on custom datasets without any code, which can then be exported to be deployed elsewhere.
Using a self-built templating engine, DeepFusion uses no UI frameworks and has minimal performance overhead. It's also won first place in over 7 competitions, including the Congressional App Challenge, Conrad Challenge, and Raspberry Pi Coolest Project competition.
Copyright © Lemon Foxmere 2026
Content last updated April 16th, 2026